

進角制御(遅角)装置製作記
固定ONディレイ(タイマの調整は可能)を作るには いろいろ方法がありますが
簡単なのは可変抵抗とコンデンサで出来ます。積分回路です。
基本回路 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
3回路 図面を書いてみましたが 実験は順次していこうと 思います。 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
タイプ①の回路  |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
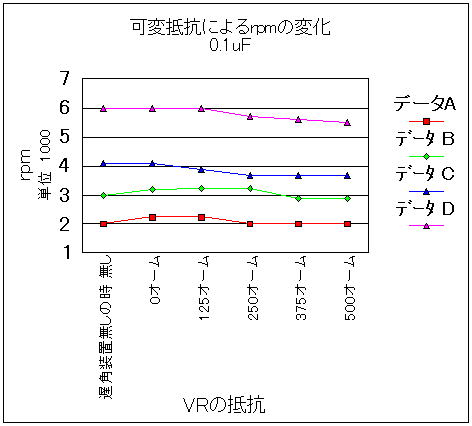
タイプ①の回路の説明 パルサの波形をタイマーで遅らす回路です。ノイズの除去にもなります。 単純計算だと 500オームと 0.1uFで 500*(0.1/1000000)で 1/20000秒遅れ 遅角では 10000rpmでは 3度に相当すると思います。 ですが 実際はもっと短くなるのではと思っています。 結果 MTX125Rで負荷無しの 0.1uFで 2000rpm 3000rpm 4100rpm 6000rpm に調整して実験しました。
 MTX125Rで負荷無しの 0.2uFで 2000rpm 3000rpm 4250rpm 5600rpm に調整して実験しました。
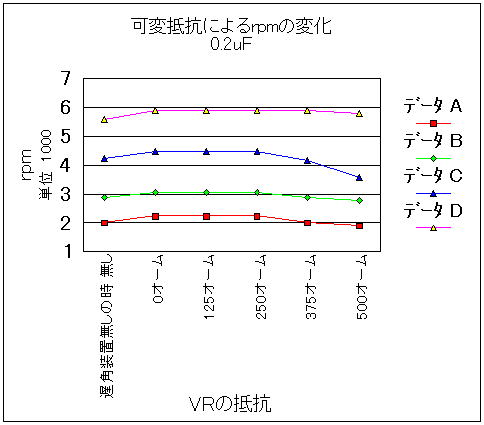 実験結果から 0.1uFと0.2uFも どちらも 同じような 変化をもたらせます。 大きな違いは 0.2uFで4000rpmの時で375オームあたりより 急速に回転数さがってしまいます。 このグラフで見る限り 0.2uFで 200オーム辺りが元気の良いことがいえます。エンジン保護の立場で設定しますと 0.1uFで250オームが良いかも知れません これは 無負荷の状態でテストした結果ですので、走行テストした時では違ってくるでしょう。 走行テスト 0.1uFで500オームで走行テストで馬力が不足気味な感じで 遅角装置無しと比べて パワーバントが6000rpmと遅れた感じです。 ノーマルCDI が無いので 比較できませんが。 0.1uF 250オームで走行テストでは ノーマルって まあこんな感じかなと言う所です。 私のMTX125Rは 始から馬力あるほうではなかったので エンジンの音 3000rpmで しばらく回していると 親父が来て エンジンの音よくなったなと 言っていました。 因みに 親父は 戦争中 戦闘機のエンジンの整備していました。 エンジンの音に関しては 詳しいようです。 アクセルに応じて ボリュームを可変 上の表のデータから 実用域で元気がよく 高回転域でエンジンの保護を考えると アクセルに応じて ボリュームを可変すれは 良い事に気がつきました。 そこで アクセルワイヤに ボリューム付けアクセルに応じて ボリュームを可変すれは 良い位置がでるのではにいでしょうが 随時実験して行こうと思います。 実験 テストされた方の報告です。(Tさん) こちらの記事を参考に、スクーターで自作CDIを楽しんでいる者です。 フォトカプラとトランジスタの間にボリュームとコンデンサの回路追加 この点火時期抑制回路が非常に有効で、エンジンが壊れなくなりました。 走行しながらハンドル左側に装着したボリュームを調整すると、 パワーの変化を体感できますし、動作が安定して実用できます。 デスビ回し進角みたいにあらかじめ進角させておいて、 壊れそうになったら遅角しています、実用レベル。 ボリューム固定でもある程度回転数に比例して遅れるので、2ストに最高です。 ボリューム調整が決まったら、その抵抗値で固定もいいですね、 ============================================================================================================================ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
タイプ②の回路 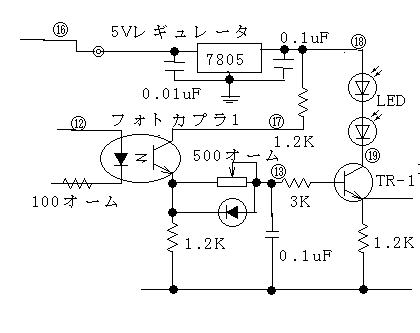 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
タイプ②の回路の説明 パルサから受け取った信号をタイマーで遅らすとともに オフディレイも作る回路です。ノイズの除去にもなります。 単純計算だと 500オームと 0.1uFで (1200+500)*(0.1/1000000)で 1/20000秒遅れ 遅角では 10000rpmでは 10度に相当すると思います。 ですが 実際はもっと短くなるのではと思っています。 実験 テストされた方の報告です。(Rさん) テスト条件 あらかじめスクーターの標準点火時期より進角12度ほどさせてます。 (点火時期の初期設定変更これをしないともっさりです) 点火時期初期設定変更が最高な結果を呼んでます。 現在この回路で大満足です 値は全て指示どおり効果も指示どおりです/ 肝心なパワーは スクーターですがホイルスピンの直後ウィリーしてスロットルを緩めないと 乗り切れません。 ノーマルCDIの時とは力強さが断然違います/ そしてレブ特性が素晴らしいですから、1万以上の高回転で本領発揮。 500Ω可変抵抗使用で200Ω掛けないぐらいで調整 1万で10度は戻ってる感じです。 500Ω全開掛けると、もっさりなので 標準より遅くなってると思います。 ハーフスロットルで下からパワーが出る200Ω前後がベスト 中間ぐらい(250Ω)で調整するとスロットの付きを悪く感じ出します。 可変が凄く効いて、楽しいの一言がフィーリングです。 全域安定したパワー感で素晴らしいです。 タイミングライトを撮影した動画を見ると 点火時期の移動はスムースです 回転数に応じて関数的に動いてます。 点火時期が一瞬にして動くのではなく 回転数に応じてるところが最高ですね。 安定度 走行中に手元で調整できるので、デトネ音が確認されたら捻ってみます 効果をハッキリ体感できます、点火時期の適正化を 実走行中に出来る処が、それも∞段の楽しさがあります。 ============================================================================================================================ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
タイプ③の回路 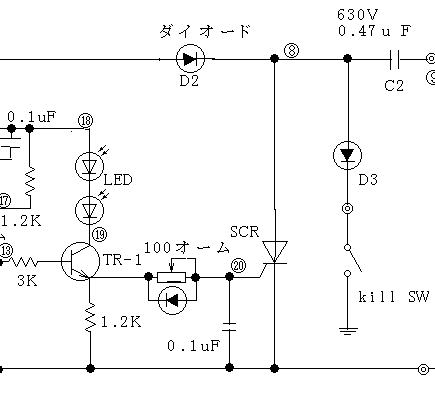 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
タイプ③の回路の説明 パルサから受け取った信号をタイマーで SCRのスイッチングを遅らす回路です。ノイズの除去にもなります。 単純計算だと 100オームと0.1uFで (100+LEDの内部抵抗200)*(0.1/1000000)で 1/50000 秒遅れ 遅角では 10000rpmでは約2度に相当すると思います。 ですが 実際はもっと短くなるのではと思っています。 結果 実験していません。 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
免責 自己責任でお願いします。< 私の実験結果ですので 全てにおいて 上手くいく保証されるものではありません。 間違いもあるかもしれません。 この情報に基づいて被ったいかなる損害についても、 当方は 一切責任を負いかねます。 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 自作CDIの製作へ 掲示板  まで まで完成度を高めていきたいと思っていますのでどんどん 書き込んでください。 |